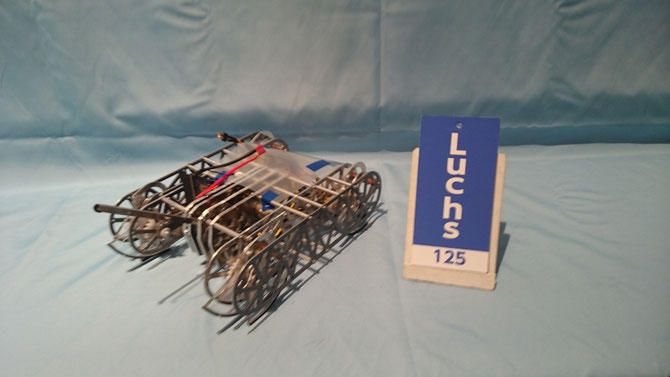
Luchs
【全長】346mm(アーム含まず)、396mm(アーム含む)
【全幅】255mm(後述)
【全高】102mm
【腕部機構】モーター4個
減速比…200:1
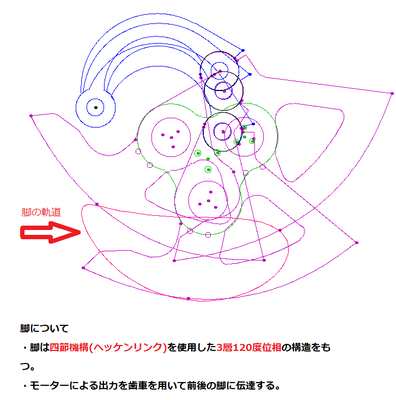
【脚部機構】ノーマルヘッケンリンク4脚
モーター各脚1個 計4個
減速比 16:1
【戦績】第25回かわさきロボット競技大会
第一回戦 敗退
第25回かわさきロボット競技大会 敗者復活戦
第一回戦 敗退
新進気鋭の1年設計者がガレージにあった古い機体をパク参考にした一品。設計の粗を個性悪目立ち溢れる機転でどうにか機体審査を潜り抜けたキワモノ。
名前の由来は戦車マニアの設計者より旧ドイツ陸軍軽戦車のLuchsから。コピー”キャット”とかそういうのではない。(Luchsはドイツ語で”山猫”の意)
【腕部】
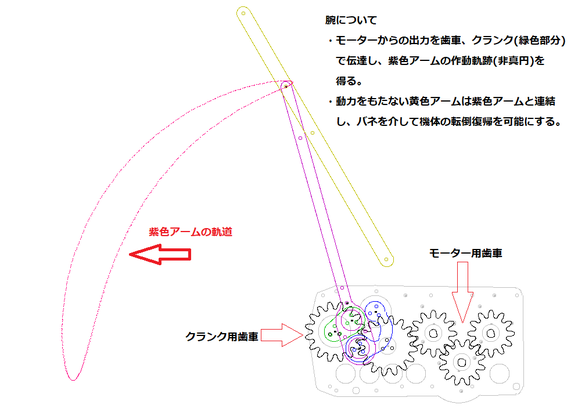
各部品の長さが非常に小さく、全周動作ができないが機構の動きは快適である。しかし構想当初では上図のようにモーターを直列に三発積む予定であったが腕用モーターと脚用
モーターが干渉するという設計ミスが発覚した結果、やむなく腕用モーターを一発に減らすことになった。更に後述の理由から黄色アーム部分を撤去している。
【脚部】
元機体を参考にして通常のヘッケンリンクの120°位相3枚脚を採用した。パーツ点数が非常に多く、整備性が劣悪である。動作性はかなり快適であったがモーターの回転を伝達するギアトレインのガタつきが大きく、更にモーター用アンプの不調により、大会当日は片方向への回転しか操作できない事態となった。総じて元機体の性能にかなり劣るものとなってしまった。